
GuidedFilter is an implementation of the Guided Filter algorithm in OpenCL. The Guided Filter is an image filter with many applications. It has a non-approximate algorithm which is O(1) in the filter window size. It has excellent performance characteristics which makes it a great alternative to the popular Bilateral Filter.
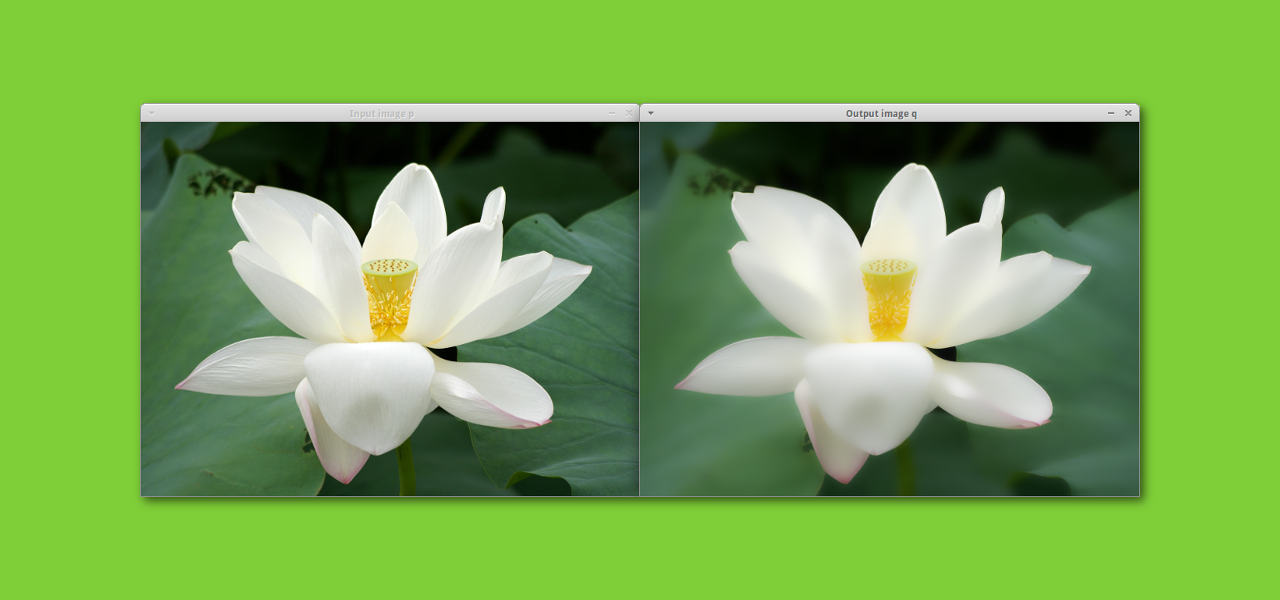
Applications of the Guided Filter include Detail Enhancement and HDR Compression, Flash/No-Flash Denoising, Matting/Guided Feathering, Haze Removal, and Joint Upsampling. But the most basic and important application of the filter, and the one that interests me, is the Edge-Preserving Smoothing. The Guided Filter gives great results and doesn’t suffer from gradient reversal artifacts that can be introduced by the Bilateral Filter.
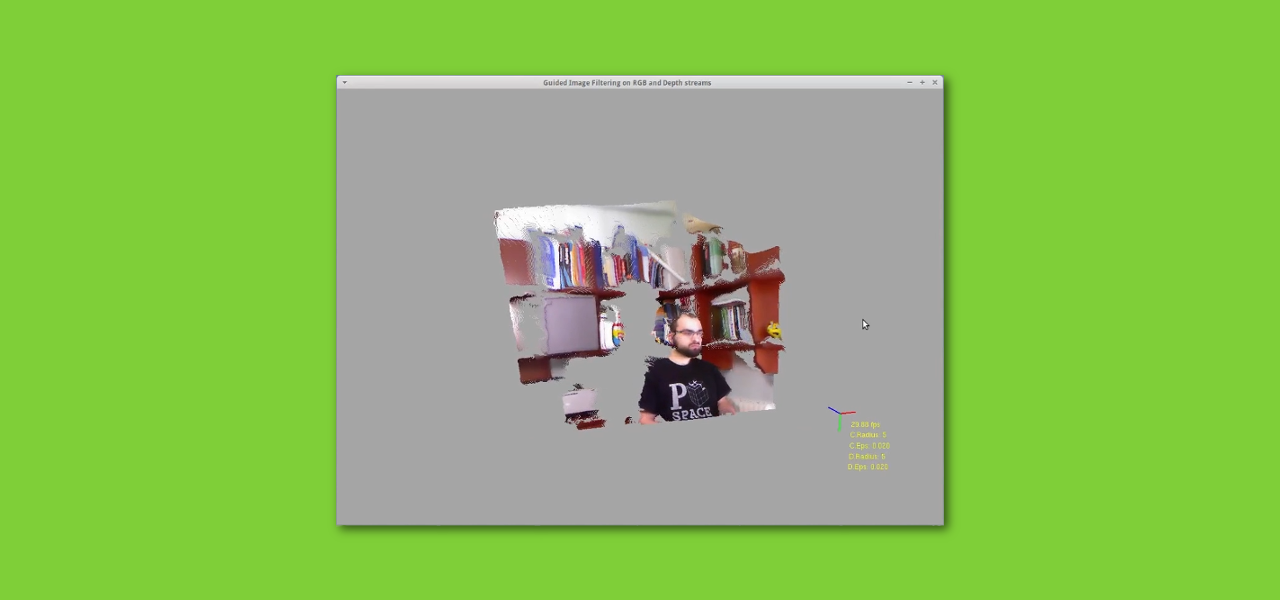
The Guided Filter can operate on RGB images, as well as Depth images. The GuidedFilter repository contains two applications that let one examine the effects of the filter interactively, on both these cases. The following videos demonstrate the applications.
Guided Image Filtering on Kinect RGB stream with OpenCL:
Guided Image Filtering on Kinect RGB and Depth streams with OpenCL:
It’s very easy to apply the Guided Filter in your own applications. A consistent API has been adopted across all operations supported by the project. You configure and initialize an object associated with an algorithm, write your data on a device buffer, execute the kernel(s), and get back the results. Below is a dummy example to showcase the workflow. For more details, take a look at the examples in the repository.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
#include <CLUtils.hpp>
#include <GuidedFilter/algorithms.hpp>
using namespace clutils;
using namespace cl_algo;
int main(int argc, char **argv) {
// Setup the OpenCL environment
CLEnv env(kernel_files); // Initializes a basic environment
env.addQueue(0, 0); // Adds a second queue
// Configure kernel execution parameters
CLEnvInfo<2> info(0, 0, 0, { 0, 1 }, 0);
const GF::GuidedFilterConfig C = GF::GuidedFilterConfig::I_EQ_P;
GF::GuidedFilter<C> gf(env, info);
gf.init(width, height, radius, eps);
// Copy data to device
gf.write(GF::GuidedFilter<C>::Memory::D_IN, data);
// Execute kernels
gf.run();
// Copy results to host
cl_float *results = (cl_float *) gf.read();
return 0;
}
You can find the complete documentation at guided-filter.nlamprian.me. The source code is available on GitHub.